Advanced Network to realize high-precise
real-time performance for Servo Control
Concept
✓ High Performance & Low Cost
✓ Simple
✓ High Reliability
✓ Easy Development
Panasonic Industry > Automation Controls Top > Motors for FA & Industrial Application > Motors > AC Servo > Realtime Express(RTEX) > RTEX Overview
✓ High Performance & Low Cost
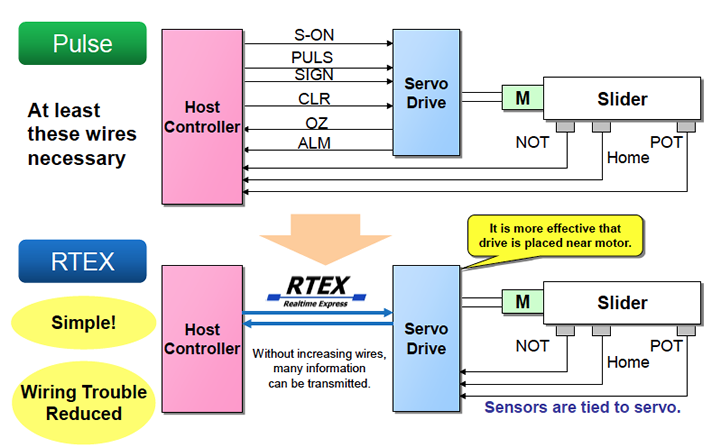
✓ Simple
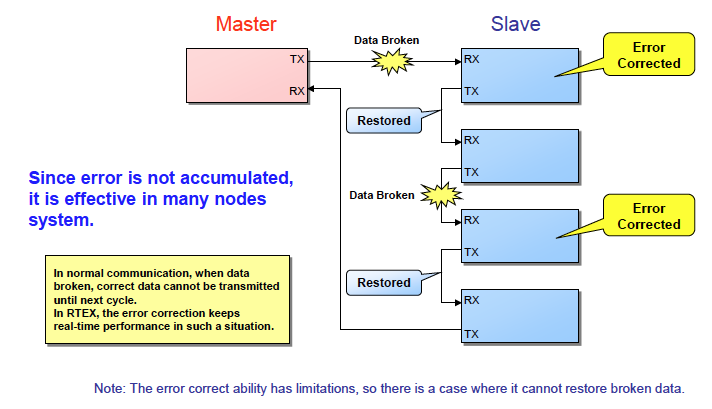
✓ High Reliability
✓ Easy Development
Please feel free to contact us if you have any inquiries or
would like to have a conference or request quotations for RTEX

*Realtime Express and RTEX are registered trademarks of Panasonic Holdings Corporation.
Introducing Realtime Express(RTEX)
Related Files



Related Information
![]()
![]()

Let's learn the basic of RTEX.
| Note: | Ethernet is a registered trademark of Xerox corporation. |
|---|
|
|
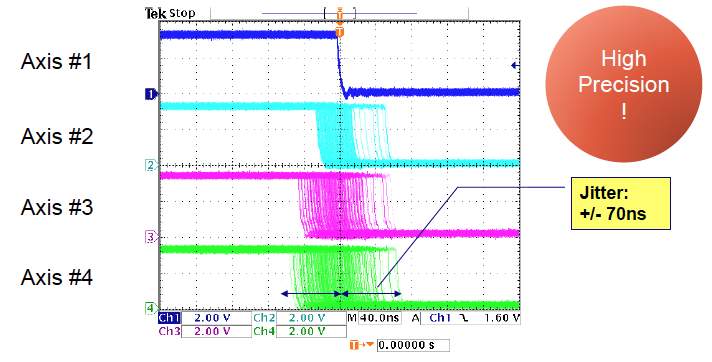
| The number of axes | : | 4 |
|---|---|---|
| Cable length inter-node | : | 0.3m |
| Note: | Generally, the jitter less than 1 us is ideal. |
|---|
| Item | Specifications |
|---|---|
| Speed | 100 Mbps |
| Physical Layer | 100BASE-TX Full-duplex by IEEE 802.3u |
| Cable | Shielded Twisted Pair by TIA/EIA-568B CAT5e |
| Topology | Ring |
| Isolation | Pulse Transformer with common-mode choke |
| Connector | 8-pin RJ45 by IEC 60603-7 |
| Cable Length | Inter-node: Max. 100 m, Total: Max. 200 m |
| Noise Immunity | 2.5 kV over, IEC 61000-4-4 Level4 compliant |
| Com. Period * | 2 to 0.0625 ms |
| Update Period * | 4 to 0.125 ms |
| Number of Axes * | Up to 32 |
| Motion Interface * | Profile Position, Cyclic Position / Velocity / Torque |
*Depending on host controller specification.