【システムメンテナンスのお知らせ】
現在、システムメンテナンスのため、サイト内検索およびスペック条件検索の機能が一時的にご利用いただけません。ご不便をおかけしますが、ご理解のほどよろしくお願い申し上げます。
【パナソニック デバイスSUNX商品 および パナソニック デバイスSUNX竜野商品 製造者変更のお知らせ】
2024年4月1日以降、本ページ内の表記、およびダウンロード対象のマニュアル等の「パナソニック デバイスSUNX株式会社」および「パナソニック デバイスSUNX竜野株式会社」を
全て「パナソニック インダストリー株式会社」と読み替えて適用するものといたします。

![]() 法人向けトップ
> 電子デバイス・産業用機器
> 制御機器トップ
> サービス・サポート
> FA技術サポート
> FAセンサ・システム用語解説
> 役に立つ用語解説(上級編)
> 光電センサ/近接センサ/ファイバセンサ/レーザセンサ
> No.074 標準検出物体
法人向けトップ
> 電子デバイス・産業用機器
> 制御機器トップ
> サービス・サポート
> FA技術サポート
> FAセンサ・システム用語解説
> 役に立つ用語解説(上級編)
> 光電センサ/近接センサ/ファイバセンサ/レーザセンサ
> No.074 標準検出物体
標準検出物体
解説
標準検出物体とは?
反射型光電センサや高周波発振型近接センサにおいて、基本仕様(検出距離、応差(ヒステリシス)など)を決定するための標準となる検出物体のことを標準検出物体といいます。
反射型光電センサの場合、一般的に、白色無光沢紙を標準検出物体とします。(特殊用途センサでは、用途に応じた検出物体(例:ガラス)となります。)
高周波発振型近接センサの場合、一般的に、鉄(厚み:1㎜)となります。
透過型光電センサ、ミラー反射型光電センサの場合は、標準検出物体の規定は特にありません。
標準検出物体の事例
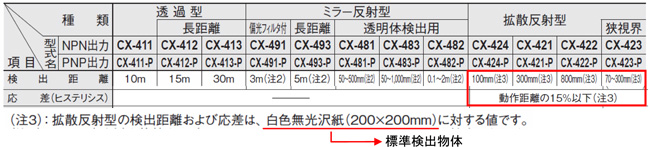
例えば、小型光電センサ拡散反射型CX-42□の場合、標準検出物体は200㎜×200㎜の白色無光沢紙となります。
出力種類(NPN出力・PNP出力)により標準検出物体が変わることはありません。
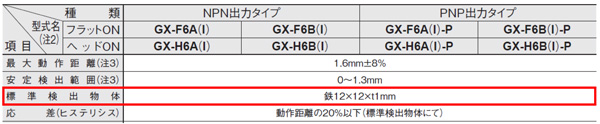
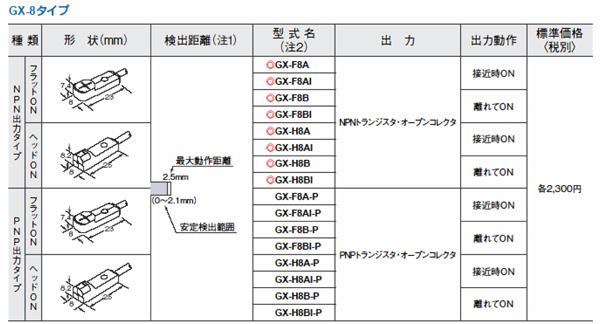
例えば、角型近接センサGX-F/H6□の場合では、標準検出物体は鉄12×12×t1㎜となります。
下記条件の相違により、標準検出物体が代わることはありません。
- 形状(ヘッドON・フラットON)
- 出力動作(接近時ON:Aタイプ・離れてON:Bタイプ)
- 出力種類(NPN出力・PNP出力)
- 発振周波数(標準タイプ・異周波タイプ)
検出物体の大きさ(面積)が変わると、どうなるのか?
|
拡散反射型光電センサとは、投光部から照射した信号光が検出物体の表面で拡散反射され、受光部に入光することにより検出するタイプです。 逆に検出物体の大きさが大きい(面積が広い)ほど、検出距離は長くなりますが、光芒と受光視野の大きさを超過した場合は、標準検出は横ばいになります。 高周波発振型近接センサも、同様の傾向となります。 限定反射型光電センサや、距離設定反射型光電センサでは、検出方法や検出原理が異なるため、このような傾向にはなりません。 |
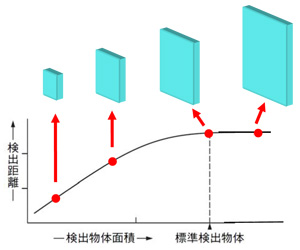 検出物体の大きさが―検出距離特性(反射型) |
検出物体の表面状態(色・光沢など)や材質が変わると、どうなるのか?
|
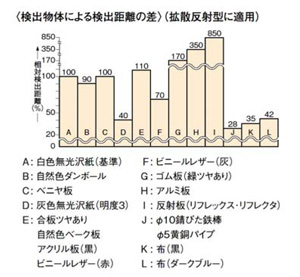
拡散反射型光電センサは、検出原理上、検出物体の大きさ(面積)だけでなく表面状態にも影響を受け、検出距離が変わります。 右図の相対検出距離は、白色無光沢紙(標準検出物体)に対する検出距離を100とした場合の各検出物体に対する検出距離の値を示します。 |
 |
|
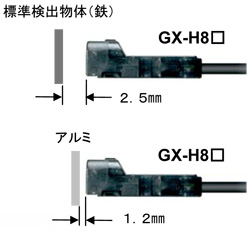
高周波発振型近接センサは、検出原理上、検出物体の大きさ(面積)だけでなく材質にも影響を受け、検出距離が変動します。 右図の修正係数は、鉄(標準検出物体)に対する検出距離を1とした場合の各金属に対する検出距離の値を示します。 標準検出物体(鉄)以外の金属を検出する場合、最大動作距離・安定検出距離は、次の手順で求めます。 |
|
|
(例:角型近接センサGX-F/H8□でアルミを検出する場合) <標準検出物体(鉄)の修正係数:1>
<アルミの修正係数:約0.48>
|
 |
PDFダウンロード
- glossary_074.pdf

関連商品










ご注文・ご使用に際してのお願い(制御部品・電子デバイス)[特定商品を除く]
ご注文・ご使用に際してのお願い(制御部品・電子デバイス)[特定商品]
ご注文・ご使用に際してのお願い(FAセンサ・システム[モータ以外])
ご注文・ご使用に際してのお願い(産業用モータ専用)