FP0H
듀얼 포트 Ethernet 탑재.※
초소형 PLC [FP0H]로 정보화, 분산 제어 실현!
※IP 어드레스는 한 개입니다
특징
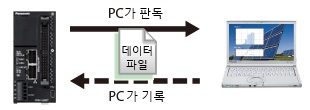
FTP 서버 기능(SSL/TLS 대응)
SD 메모리 카드의 로깅 데이터를 판독하여 설정값 등의 파라미터 파일 기록 가능
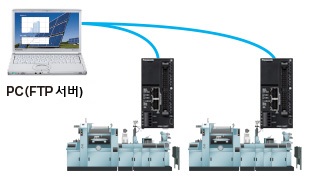
FTP 클라이언트 기능(SSL/TLS 대응)
FP0H에서 발생한 타이밍에 PC(FTP 서버)로 데이터 파일 기록, 판독 가능
|
|
파일 형식으로
여러 대의 데이터 수집,
열람, 데이터 기록
|
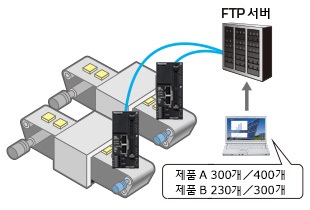
공장 및 사무실의 각종 전력 데이터를 FTP 서버에 정기적으로 전송 |
|---|
 |
|
|
생산 정보를 서버에 축적하여 임의의 타이밍에 확인 가능 |
|---|
 |
|
|
고속 연산 처리 [기존 대비 8배의 속도!]
기본 명령:10ns~(10k 스텝까지)
고용량 최대 64k 스텝 [기존 대비 2배!]
프로그램 용량:64k/40k/32k/24k 스텝 가변
데이터 용량:12k/24k/32k/64k 스텝 가변
|
|
| I/O: |
입력 16점, 출력 16점 트랜지스터 출력(NPN / PNP) |
| 내장 I/F: |
Ethernet×2포트, RS-232C×1ch, USB×1ch |
| 확장 I/F: |
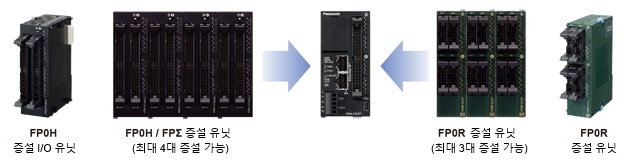
FP0H / FPΣ 증설 버스×1, FP0R 증설 버스×1
카세트 슬롯×1(RS-232C, RS-232C×2, RS-485, RS-232C + RS-485) |
| 툴: |
FPWIN GR7, FPWIN Pro7 |
최대 I/O 점수 384점, FP0H / FPΣ / FP0R의 유닛을 증설 가능
필요한 기능을 선택하여 여러 가지 기기를 제어!
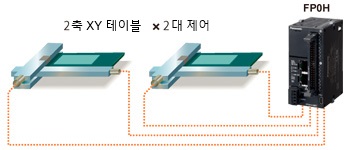
내장 4축 펄스 출력
펄스 출력을 4축 내장하여, 2축 직선 보간을 동시에 2쌍 제어할 수 있습니다. 예를 들어 XY 테이블 2대의 제어도 가능합니다. |
 |
|
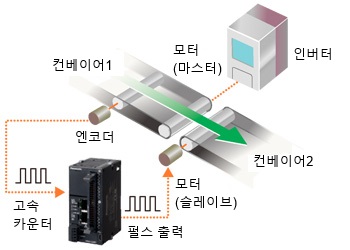
고속 카운터 입력+펄스 출력
래더 프로그램을 조합하여 엔코더에서의 펄스 신호를 고속 카운터 입력으로 계측하고, 그에 따라 펄스 출력의 주파수를 조절하는 것으로 마스터축에 대한 슬레이브축의 속도 동기를 실행하는 애플리케이션의 구축도 가능합니다.
|
오른쪽 그림은 인버터에서 제어되는 컨베이어1의 속도를 엔코더 펄스의 카운터에서 계측하여, 그 속도에 맞춘 펄스 출력(JOG 운전)을 모터(슬레이브)에서 실행, 컨베이어2의 속도를 동기시킨 것입니다.
|
|
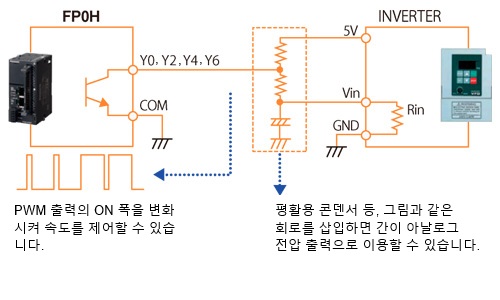
다점 PWM 출력(4ch) 내장
FP0H에서는 펄스 출력 포트를 PWM 출력 포트로 사용할 수 있습니다.
응용예로서, 아날로그 전압 출력으로 이용하여 인버터의 속도 제어 등을 실행할 수 있습니다.
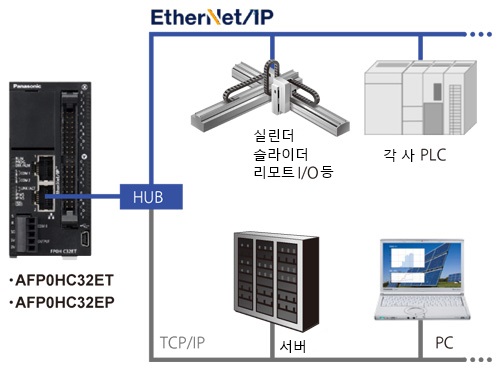
■ EtherNet/IP, Modbus-TCP, MC 프로토콜 대응※
■ 각종 로봇 및 PLC와 간단 연결※
■ 카세트 방식을 통해 유닛의 비용과 설치 공간 절감
※:Ethernet 있는 타입에 한함
EtherNet/IP에 대응
Ethernet 있는 타입 컨트롤 유닛은 EtherNet/IP에 대응.
각종 로봇 및 PLC와 간단히 연결하여 제어와 통신을 실행할 수 있습니다.
(주):EtherNet/IP는 ODVA의 상표입니다. |
 |
|
카세트 방식으로, 유닛의 비용과 설치 공간 삭감
컨트롤 유닛에 간단하고 저비용으로 시리얼 통신 기능을 확장할 수 있습니다. |
 |
|
■ SD 메모리 카드 슬롯 내장. 로깅 추적 기능 탑재※
■ 프로젝트 복사 기능으로 PC 없이 래더 데이터 복사 가능※
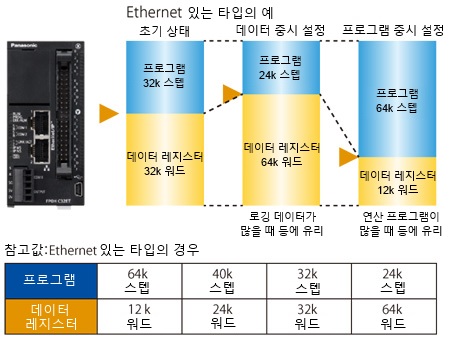
■ 데이터 용량을 가변식으로 하여, 용량 부족 커버
■ 프로그램 용량 최대 64k 스텝※
※:Ethernet 있는 타입에 한함
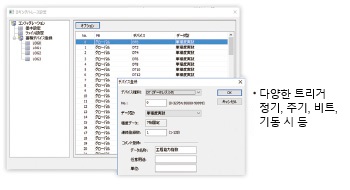
간단히 여러 개 동시 로깅
로깅 설정은 환경설정 화면에서 설정할 수 있습니다.
또한, 4파일까지 동시에 실행 가능합니다. |
 |
|
데이터 용량을 공유하여 용량 부족을 커버
고가의
상위 기종으로 변경 불필요 |
 |
|
SD 메모리 카드로 프로그램 갱신 가능
SD 메모리 카드에 프로그램을 저장하고 읽어오기 가능.
SD 메모리 카드 경유로 프로그램을 간단히 갱신할 수 있습니다.
※:Ethernet 있는 타입에 한함 |
![]() |
|
컨트롤 유닛에 펄스 출력 4축 내장(각 축 최대 100kHz) [컨트롤 유닛]
전용 설정 툴로 설정한 위치 결정 동작 패턴을 기동하면 간단히 위치 결정 제어 가능
위치 제어 설정
위치 결정 테이블(주1) 및 각 축 파라미터(주2)를 설정합니다. |
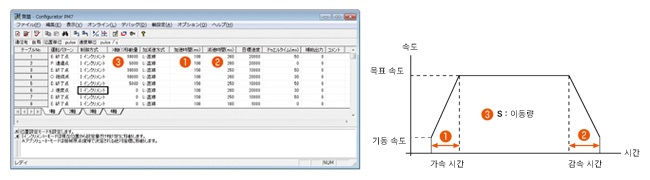 |
| (주1): |
위치 결정 테이블은 이동량, 목표 속도, 가・감속 시간, 운전 모드 등의 각각의 위치 제어 동작의 정보를 나타냅니다. |
| (주2): |
각 축 파라미터는 JOG 운전 및 원점 복귀의 운전 조건, 리미트 입력 논리, 정지 시의 감속 시간 등을 나타냅니다. |
|
|
위치 결정 유닛(고속 기동 5μs)으로 초고속의 리니어 서보에도 대응 가능 [증설 유닛]
펄스 출력 최대 4Mpps, 고속 기동 5μs로 리니어 서보도 제어 가능
전자 부품의 팔레타이징 등, 쇼트 스트로크 동작을 고속으로 반복하는 용도에 최적입니다.
고속 카운터를 탑재하여 이상 검지 가능
위치 결정 운전 시에 엔코더 등의 피드백 펄스를 카운트하여, 구동계 오류 등 불의의 사고 검지에 이용할 수 있습니다.
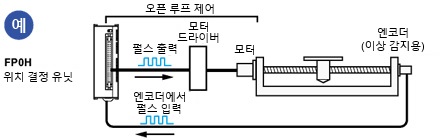 |
| 엔코더에서의 피드백 펄스를 카운트하여 오류 검지에 사용 |
|
JOG 위치 결정 기능으로 치수 이송에도 대응
고속 기동 및 반복 제어로 치수 이동 가공 용도에도 대응 가능합니다.
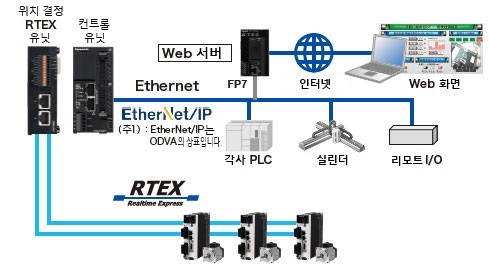
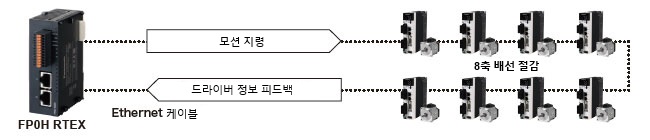
위치 결정 RTEX 유닛으로 파나소닉 AC 서보 모터 제어 [증설 유닛]
위치 결정 RTEX 유닛 AFP0HM4N(4축 타입)/AFP0HM8N(8축 타입)
고속 네트워크를 사용한 모션 제어부터 오픈 네트워크 대응까지 소형 PLC로 실현
|
네트워크 서보 앰프 MINAS A5N/A6N 호환
배선 공수를 크게 줄입니다.
최대 축 수 16축. 8축 유닛 최대 2대 장착 가능
※동기 제어
4축 타입: 가상축 포함 최대 6축(가상축: 2축)
8축 타입: 가상 축 포함 최대 8축(가상축: 2축)
충실한 모션 기능
[다축 동기 제어]
- 전자 기어
마스터축과 슬레이브축의 속도 비율을 변경하는 기능
- 전자 클러치
전자 기어의 출력에 대해 클러치를 연결하는 기능
- 전자 캠
마스터축의 동작과 설정한 캠 패턴에서 슬레이브축의 이동량을 결정하여 출력하는 기능
|
|
[보간 제어]
- 2축, 3축 직선 보간 제어
- 2축 원호 보간 제어
- 3축 나선 보간 제어
[펄서 입력 기능]
연결된 펄서를 통해 수동 운전으로 각 축 제어 가능
- 채널 수 :최대 3ch
- 계수 범위 :−2,147,483,648~2,147,483,647 펄스
- 입력 모드 :위상 입력, 방향 판별 입력, 개별 입력(각 모드 체배 기능 있음)
[RTEX 통신]
지령 갱신 주기 1ms/8축
Web 서버에서 볼 수 있는 MINAS의 데이터
|
- 기본 정보
위치・속도・토크
앰프 품번・모터 품번
- 오류 정보
에러 코드
에러 이력
- 상태 표시
서보 앰프 내부 온도
엔코더 내부 온도
열화 진단
|
|
RTEX(Realtime Express)의 특징
빈번한 배선이 필요 없어 설계 및 배선 공수 절감 |
 |
|
고속 네트워크와 고성능 서보로 동기 제어 실현 |
 |
|
위치 결정 동작 설정
Control FPWIN Pro7/Control FPWIN GR7에서 Configurator PM7-RTEX를 기동하여 간단히 파라미터 설정, 위치 결정 동작 설정 가능
※Configurator PM7-RTEX는 Control FPWIN Pro7 Ver.7.3.0.0 이후/Control FPWIN GR7 Ver.2.26.0 이후부터 호환 |
 |
|
FPΣ의 초소형 사이즈 계승
높이 90mm의 초소형 사이즈. 장치의 소형화에 공헌
FPΣ의 래더 프로그램을 FP0H용으로 변환 가능
Control FPWIN GR/GR7에서 작성한 FPΣ용 래더 프로그램을 FP0H용으로 변환 가능
FPΣ에서 FP0H로 변경 시 새로운 래더 프로그램 작성 불필요
(주):지원 대상 외 명령(F176 SPCH:원호 보간)을 사용 중인 경우는 해당하는 명령을 변경한 후 기종을 변경하십시오.
맨위로
맨위로