
 企業專屬首頁
> 電子元件/工業用機器
> 制御機器首頁
> FA 感測器 & 工控元件
> 感測器
> 安全光柵‧安全機器
> 小型安全光柵[Type4 PLe SIL3]SF4B-C
> 使用注意事項
企業專屬首頁
> 電子元件/工業用機器
> 制御機器首頁
> FA 感測器 & 工控元件
> 感測器
> 安全光柵‧安全機器
> 小型安全光柵[Type4 PLe SIL3]SF4B-C
> 使用注意事項
小型安全光柵[Type4 PLe SIL3]SF4B-C
使用注意事項
配線
- 請參閱使用本裝置的地區相關標準進行設置。
此外,請勿因接地故障等導致發生危險的誤動作,敬請注意。
- 請務必在切斷電源的狀態下進行配線作業。
- 請確認電源的波動,以免電源輸入超過額定範圍。
- 使用市售的開關調節器時,請務必將電源的框架式接地(F.G.)端子接地。
- 在感測器安裝部周圍使用作為干擾發生源的設備(開關調節器、變頻馬達等)時,請務必將設備的框架式接地(F.G.)端子接地。
- 請避免與高壓線和動力線並行配線,或使用同一配線管,否則會因電磁感應而導致誤動作。
互鎖功能
- 可根據互鎖設定輸入(淡紫色)的配線,來選擇手動復位/自動復位。選擇手動復位,則互鎖有效。
| 互鎖設定輸入線(淡紫色) | 互鎖功能 |
|---|---|
| 使用PNP輸出時:連接到+V 使用NPN輸出時:連接到0V |
手動復位 |
| 開路 | 自動復位 |
- 使用互鎖功能時,請務必確認危險區域內無操作人員。
否則會引起重傷或死亡等事故。
手動復位
- 本裝置即使入光,控制輸出(OSSD1、OSSD2)也不會自動變為ON。本裝置在入光狀態時,通過重定[投光停止輸入/斷開復位輸入→0V或+V短路→開路](OSSD1、OSSD2)變為ON。
- 安裝重定按鈕時,應能始終掌握整個危險區域,
並且可在危險區域外進行操作。
自動復位
- 在本裝置入光時,控制輸出(OSSD1、OSSD2)會自動變為ON。
- 在自動重定模式下使用本裝置時,,請務必使用安全繼電器模組等防止安全輸出遮斷後的系統自動重定。(依據EN 60204-1)
| 使用手動控制器SFB-HC(另售),可變更互鎖條件。詳情請參閱產品附帶的使用說明書。 |
投光停止功能
- 是指使投光器的投光動作停止的功能。
投光停止輸入/復位輸入線(粉色)的狀態下,可以選擇投光/投光停止。
| 互鎖 功能 |
投光停止輸入/ 復位輸入線(粉色) |
投光停止 輸入 |
控制輸出狀態 (OSSD1、OSSD2) |
|---|---|---|---|
| 手動復位 | 開路 | 無效 | ON |
| 使用PNP輸出時:連接到+V 使用NPN輸出時:連接到0V |
有效 | OFF | |
| 自動復位 | 開路 | 有效 | OFF |
| 使用PNP輸出時:連接到+V 使用NPN輸出時:連接到0V |
無效 | ON |
- 投光停止時,控制輸出(OSSD1、OSSD2)變為OFF。
- 通過該功能,即使在裝置一側也能確認因噪音導致的錯誤操作及控制輸出(OSSD1、OSSD2)、輔助輸出異常。
- 投光停止輸入/復位輸入線(粉色)連接到0V或+V(手動復位時開路)就能復位到正常動作。
- 對於安裝有SF4B-C系列的機械,請勿將投光停止功能用於機械停止目的。
否則可能會造成死亡或者重傷。
外部設備監控功能
- 確認連接控制輸出(OSSD1、OSSD2)的外部安全繼電器,是否按控制輸出(OSSD1、OSSD2)正常動作的功能。監控外部安全繼電器的b接點,檢測到因接點焊粘連等動作不良而引起的異常狀態時,就會將本裝置切換至鎖定狀態,使控制輸出(OSSD1、OSSD2)變為OFF。
外部設備監控功能有效時
- 請將外部設備監控輸入(黃綠色)連接至控制輸出(OSSD1、OSSD2)所連接的外部安全繼電器上。
外部設備監控功能無效時
- 請對外部設備監控輸入(黃綠色)和輔助輸出(黃綠/黑色)進行接線。此時,請將輔助輸出的動作模式設為“控制輸出(OSSD1、OSSD2)的負邏輯”(出廠時的設定)。
- 將外部設備監控功能設為無效的情況下,不能在輔助輸出上連接外部機器。
| 還可使用手動控制器SFB-HC(另售),將外部設備監控功能設為無效。詳情請參閱產品附帶的使用說明書。 |
輔助輸出(非安全輸出)
- 作為非安全用途,本裝置配備有輔助輸出(黃綠色/黑色)。投光器上配備有輔助輸出。
| 輔助輸出的設定 | 正常工作 | 鎖定 | ||
|---|---|---|---|---|
| 投光停止 | 控制輸出(OSSD1、OSSD2)狀態 | |||
| 入光 | 遮光 | |||
| OSSD的負邏輯 (出廠時的設定) |
ON | OFF | ON | ON |
- 對於安裝有SF4B-C系列的機械,請勿將輔助輸
出用於機械停止目的。
否則可能會造成死亡或者重傷。
光軸無效功能(僅限SF4B-□CA-J05)
- 錯誤使用光軸無效控制,會引發事故。請務必正確理解光軸無效控制後使用。光軸無效控制,有以下國際標準的要求事項。
ISO 13849-1(EN ISO 13849-1/JIS B 9705-1)
IEC 61496-1(ANSI/UL 61496/JIS B 9704-1)
IEC 60204-1(JIS B 9960-1)
EN 415-4
ANSI B11.19
ANSI/RIA R15.06 - 機械運行時,請在安全期間使用光軸無效控制。執行光軸無效控制時,請採用其他方法來確保安全。
- 檢測物體通過時,光軸無效控制有效的情況下,請按照以下內容配置光軸無效感測器:人體與檢測物體同時侵入,或者檢測物體尚未通過時,人體侵入的情況下,光軸無效控制的條件不應成立。
- 使用光軸無效功能前,請務必確認動作。
- 光軸無效功能可使本裝置的安全功能暫時失效。控制輸出(OSSD1、OSSD2)為ON時,想在不停止機械的情況下使工件通過本裝置的檢測區域時,可使用該功能。
滿足以下所有條件時,光軸無效功能有效。
(1) 控制輸出(OSSD1、OSSD2)應置ON。
(2) 光軸無效功能感測器A、B從OFF(開路)變為ON。此時光軸無效功能感測器A、B置ON的時間差應為0.03~3秒(註1)。 - 光軸無效功能感測器上可使用半導體輸出的光電感測器、接近感測器和N.O.(常開)接點的定位開關等。
| (註1): | 使用Ver.2.1以上的手持控制器SFB-HC(另售),且在光軸無效輸入A上連接N.O.(常開)型光軸無效感測器,在光軸無效輸入B上連接N.C.(常閉)型光軸無效感測器,從而可在0~3秒內使用。 |
|---|---|
| (註2): | 可使用Ver.2以上的手持控制器SFB-HC(另售)來設定光軸無效功能用指示燈診斷功能,但是使用時請設為無效。設為有效時,將無法使用光軸無效功能。 |
|
過逾功能(僅限SF4B-□CA-J05)
- 過逾功能可使本裝置的安全功能強制無效。使用光軸無效功能時,控制輸出(OSSD1、OSSD2)為OFF的情況下,以及啟動生產線時,想要在光軸無效感測器為ON的狀態下啟動機械時,可使用該功能。滿足以下所有條件時,過逾功能有效。
(1)光軸無效輸入A、B的一方或者兩者中應有信號輸入。
(2)應將過逾輸入(黃色)短路連接0V或者+V,應開放投光停止輸入/復位輸入(粉色)(持續3秒)。
兩大條件中任一條件無效,或者經過60秒(註1)後,過逾功能將會變為無效。 - 過逾功能僅在聯鎖功能無效(自動復位)時動作。
| (註1): | 使用Ver.2.1以上的手持控制器SFB-HC(另售),可在60~600秒的範圍內以10秒為單位進行變更。 |
|---|---|
| (註2): | 可使用Ver.2以上的手持控制器SFB-HC(另售)來設定光軸無效功能用指示燈診斷功能,但是使用時請設為無效。設為有效時,將無法使用光軸無效功能。 |
| (註3): | 過逾功能僅在自動復位(聯鎖功能無效)時動作。 |
- 用於啟動過逾功能的裝置,請務必手動進行操作。另外,對於啟動過逾功能的裝置,請按照以下內容進行安裝:始終可掌握整個危險區域,且能在危險區域以外進行操作。
- 使用過逾功能的情況下,請務必確認危險區域內是否有作業人員。否則可能會造成死亡或重傷。
其他
- 本产品是用于工业环境目的开发/制造的产品。
- 本產品請勿用在AGV等移動設備上。
- 使用時請避開通電時的過渡狀態(2s)。
- 請避免在蒸汽、灰塵等較多的場所中使用。
- 請注意避免直接沾到稀釋劑等有機溶劑和水、油、油脂。
- 因種類而異,但是快速啟動式和高周波點燈式螢光燈的光可能會對檢測產生影響,因此請注意避免直接入光。
- 以“PSDI 模式”使用本裝置時,必須在本裝置與機械之間構建適當的控制電路。詳情請參閱所在國家或地區的相應規格、標準。
- 在日本國內使用時,本裝置不可用作沖壓安全用設備。日本國內的沖壓設備、裁切機( 切紙機) 等請使用安全光SF4B-□-01〈V2〉使用。
| ・ | 本樣本為產品選型指南,使用時,請務必閱讀產品使用說明書。 |
|---|---|
| ・ | 出廠時已對投·受光器做出調整,請將序列號相同的投光器和受光器相組合使用。序列號標記在投光器及受器的銘牌上。( 型號名稱的下方) |
- 開始作業時請務必進行檢查,確保安全。
- 請勿將本裝置用於動作過程中無法通過急停開關緊急停止的機械。
檢測區域
- 請採用以下構造:要到達機械的危險部分時,必須經過檢測區域。另外,在機械的危險部分作業的情況下,請設計為以下構造:人體的一部分或全部均留在檢測區域內。如未檢測到人體,則可能會造成死亡或重傷。
- 請勿用於反射型、回歸反射型的配置。
- 針對1個投光器(受光器),不能連接多個受光器(投光器)。
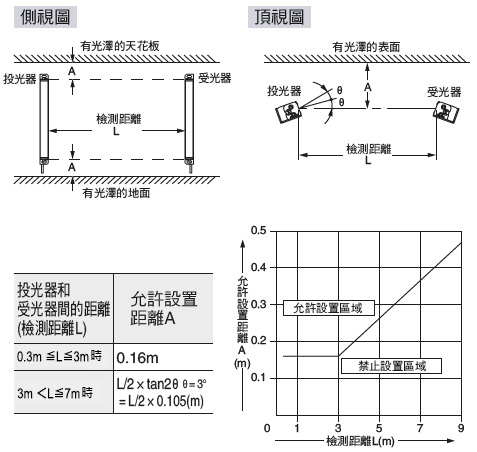
光澤面的影響
- 安裝本裝置時,應考慮設置部位存在光澤面的影響,並採取塗裝光澤面、遮掩、加粗光澤面、變更光澤面的材質等適當措施。若不考慮光澤面的影響問題而不採取措施,則安全光柵可能無法進行檢測,可能會造成死亡或重傷。
- 如下圖所示,請將本產品設置在離開金屬裝飾的牆壁、地板、天花板、金屬工件等或外罩、面板、玻璃等的光澤面(光反射率高的表面)大於A(m)的位置。
|
關於手動控制器
- 本裝置可使用手持控制器SFB-HC(另售)來設定各項功能。各項功能中,最小檢測物體的大小等與安全距離有關的內容可能會發生變化。設定各項功能時,請重新計算安全距離,安裝時請確保大於安全距離的空間。未充分確保空間的情況下,在到達機械的危險部分之前,機械可能不會緊急停止,可能會造成死亡或重傷。
| 關於使用手持控制器SFB-HC(另售) 來設定功能的詳情,請參照手持控制器的使用說明書。 |
安全距離
- 請正確地計算安全距離,安裝時,請務必在機械危險部分與本裝置的檢測區域之間確保大於安全距離的間隔。(關於計算公式,請確認最新的規格。)弄錯安全距離的計算方法,或未充分確保間隔的情況下,在到達機械的危險部分之前,機械可能不會緊急停止,可能會造成死亡或重傷。
- 實際設計系統之前,請參照本裝置使用當地的相應規格,並安裝本裝置。
本裝置最小檢測物體的尺寸因是否使用浮動消隱功能而異。請按最小檢測物體的正確尺寸和計算公式計算安全距離。
使用浮動消隱功能時最小檢測物體的大小
| 未設定 | 設定(註1) | |||
|---|---|---|---|---|
| 1光軸 | 2光軸 | 3光軸 | ||
| SF4B-H□C(A-J05) (最小檢測物體Φ25mm) |
ø25mm | ø45mm | ø65mm | ø85mm |
| SF4B-A□C(A-J05) (最小檢測物體Φ45mm) |
ø45mm | ø85mm | ø125mm | ø165mm |
(註1):關於浮動消隱功能,請參照基本資訊頁面。
- 人體垂直侵入(通常)本產品的檢測區域時,使用以下計算公式來求出安全距離。
侵入方向為非垂直方向時,請務必確認相關規格(地區、機械的規格等)。
歐洲(EU)(根據EN ISO 13855)(還適用於ISO 13855/JIS B 9715)
相對於檢測區域,侵入方向為垂直方向時
〈最小檢測物體在Φ40mm以下時〉
・計算公式① S=K×T+C
| S: | 安全距離(mm) 檢測領域的線上(表面)與機器危險部從檢測領域到最近場所之間所需的最小距離。 |
|---|---|
| K: | 人體或者物體的侵入速度(mm/s) 通常按照2,000(mm/s)來計算。 |
| T: | 整個裝置系統的反應時間(s) T=Tm+TSF□C Tm :機械的最大停止時間(s) TSF□C :本裝置的反應時間(s) |
| C: | 根據本裝置的最小檢測物體求出的追加距離(mm)。 但是,C應不足0。 C=8×(d-14) d :最小檢測物體的直徑(mm) |
| ・ | 計算安全距離S時,分為以下五種情況。 首先,在上述計算公式中按照K=2,000(mm/s)進行計算。 將此時的計算結果分為1)S<100、2)100≤S≤500、3)S>500三種情況。 計算結果為3)S>500時,在上述計算公式中按照K=1,600(mm/s)重新進行計算,並將此時的計算結果分為4)S≤500、5)S>500兩種情況。 詳情請參照產品所附帶的使用說明書。 |
|---|---|
| ・ | 在「PSDI模式」下使用本裝置時,需要計算不同於上述內容的安全距離S。詳情請參照所在國家和地區的相應規格、規定。 |
〈最小檢測物體大於Φ40mm時〉
・計算公式① S=K×T+C
| S: | 安全距離(mm) |
|---|---|
| K: | 人體或者物體的侵入速度(mm/s) 按照1,600(mm/s)進行計算。 |
| T: | 整個裝置系統的反應時間(s) T=Tm+TSF4B Tm :機械的最大停止時間(s) TSF□C :本裝置的反應時間(s) |
| C: | 根據本裝置的最小檢測物體求出的追加距離(mm) C=850(mm)(恒定) |
美國(根據ANSI/RIA 15.06)
計算公式② S=K×(TS+TC+TSF4B+Tbm)+Dpf
| S: | 安全距離(mm) 檢測區域的線上(面上)和機械的危險部分之間,從檢測區域到最近場所所需要的最低限度的距離。 |
|---|---|
| K: | 侵入速度[根據OSHA,推薦值為63(inch/s)≒1,600(mm/s)]。 ANSI/RIA 15.06未對侵入速度做出定義。要確定所適用的K的值時,請考慮包括作業人員身體能力在內的所有因素。 |
| Ts: | 根據最終停止的控制因素(氣閥)所測得的機械的停止時間(s) |
| Tc: | 機械制動器工作時所需要的機械控制電路的最大反應時間(s) |
| TSF4B: | 本裝置的反應時間(s) |
| Tbm: | 根據制動器監控所允許的追加停止時間(s) 機械上裝備有制動器監控的情況下,使用以下計算公式。 Tbm=Ta-(TS+TC) Ta :制動器監控設定時間(s) 機械上未裝備制動器監控的情況下,建議將(Ts+Tc)的20%以上設為追加停止時間。 |
| Dpf: | 根據本裝置的最小檢測物體求出的追加距離(mm) SF4B-H□C(A-J05) :Dpf=61.2mm SF4B-A□C(A-J05) :Dpf=129.2mm Dpf=3.4×(d-0.276)(inch) ≒3.4×(d-7)(mm) d :最小檢測物體的直徑0.985(inch)≒25(mm)[SF4B-H□C(A-J05)] 最小檢測物體的直徑1.772(inch)≒45(mm)[SF4B-A□C(A-J05)] |

- (02)2757-1808 授理時間 9:00-17:30(除敝司休假日)
關於產品的諮詢
技術諮詢窗口
※敝司無販售洗衣機/冷氣機等相關家電電器,請另洽松下電器
(02)2757-1808
授理時間 9:00-17:30
(除午休時間11:50-12:50,敝司休假日)
下載

相關資訊
服務/支援