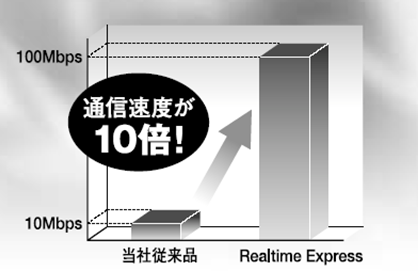
サーボに要求される高度なリアルタイム性を実現するために
独自開発した先進のネットワーク
コンセプト
✓ 性能とコストの両立
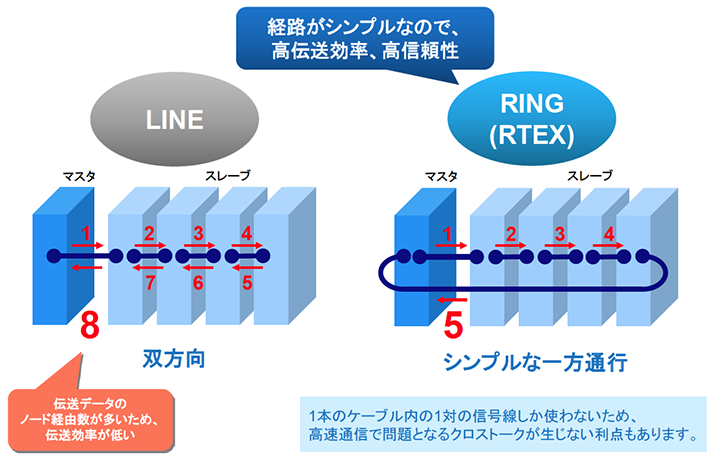
✓ シンプル
✓ 高信頼性
✓ 機器の開発が容易
【システムメンテナンスのお知らせ】
現在、システムメンテナンスのため、サイト内検索およびスペック条件検索の機能が一時的にご利用いただけません。ご不便をおかけしますが、ご理解のほどよろしくお願い申し上げます。
![]() 法人向けトップ > 電子デバイス・産業用機器 > 制御機器トップ > FAセンサ・システム > FA・一般産業用モータ > ACサーボ > サーボ用高速ネットワーク Realtime Express (RTEX)
法人向けトップ > 電子デバイス・産業用機器 > 制御機器トップ > FAセンサ・システム > FA・一般産業用モータ > ACサーボ > サーボ用高速ネットワーク Realtime Express (RTEX)


✓ 性能とコストの両立
✓ シンプル
✓ 高信頼性
✓ 機器の開発が容易
RTEXのご相談はこちらで承ります。
まずはお気軽にお問い合わせください。
0120-70-3799又は
※Realtime ExpressおよびRTEXは、パナソニック ホールディングス株式会社の登録商標です。
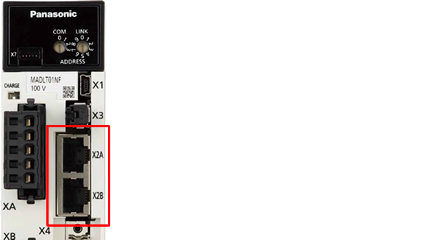
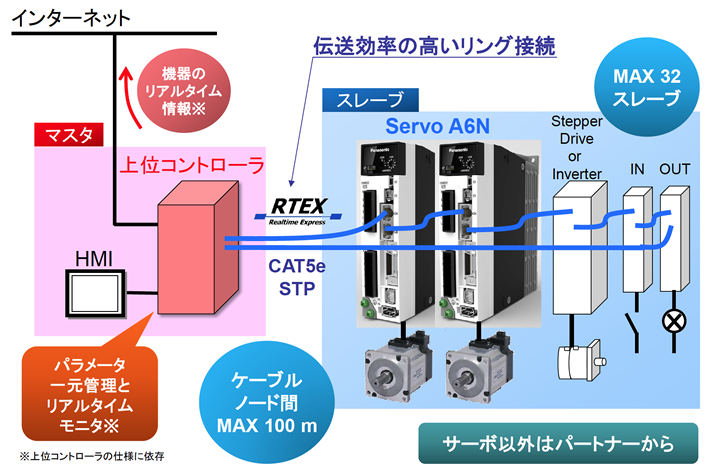
Realtime Express (RTEX) のご紹介
Realtime Express (RTEX)は、サーボに要求される高度なリアルタイム性を実現するために当社が独自開発した先進のネットワークです。 |
 |
| (*1) | 軸数は上位コントローラの仕様に依存します。 |
|---|---|
| (*2) | カテゴリ5e以上のシールド付きツイストペアケーブルを使用します。 |
| ※ | Realtime Expressはパナソニック ホールディングス株式会社の登録商標です。 |

| ※ | 2022年1月現在 |
|---|
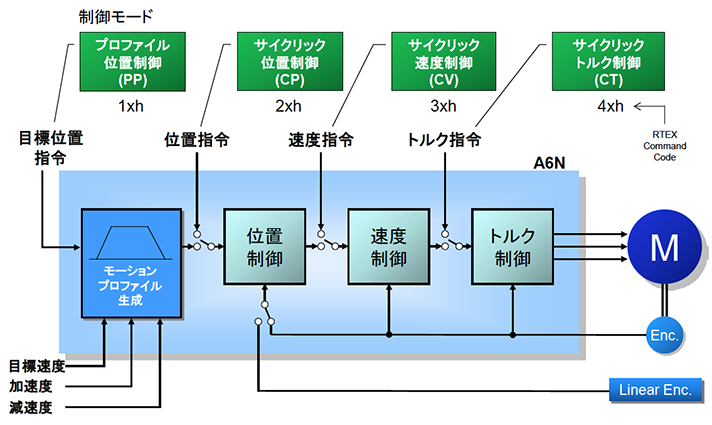
| ※ | プロファイル位置制御はPTP制御にのみ適用可能。 |
|---|
| 指令更新 周期 |
通信周期 | 最大軸数(※) | 可能な制御モード | ||
|---|---|---|---|---|---|
| 16バイトモード | 32バイトモード | ||||
| 4.000 ms | 2.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 2.000 ms | 2.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 2.000 ms | 1.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 1.000 ms | 1.000 ms | 32 | 16 | PP, CP, CV, CT | |
| 1.000 ms | 0.500 ms | 32 | 16 | PP, CP, CV, CT | Typical |
| 0.500 ms | 0.500 ms | 32 | 16 | PP, CP, CV, CT | |
| 0.500 ms | 0.250 ms | 16 | - | PP, CP, CV, CT | |
| 0.250 ms | 0.250 ms | 16 | - | PP, CP, CV, CT | |
| 0.250 ms | 0.125 ms | 8 | - | CP, CV, CT | |
| 0.125 ms | 0.125 ms | 8 | - | CP, CV, CT | |
| 0.125 ms | 0.0625 ms | 4 | - | CP, CV, CT | |
| 通信周期 | : | 通信フレームの送信周期 |
|---|---|---|
| 指令更新周期 | : | 通信フレーム上の指令データの更新周期 |
| ※ | サーボ以外の機器が混在する場合は、本記載値よりも減少します。 |
|---|
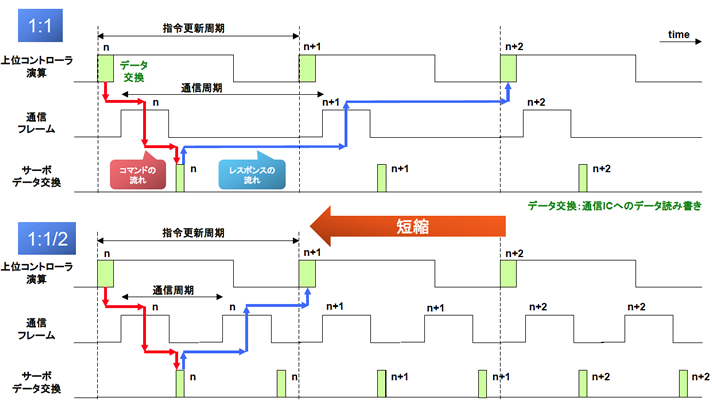
| ※ | 2回同じコマンドを伝送。先のデータが通信異常となった場合には後のデータをサーボ制御に使用。 |
|---|
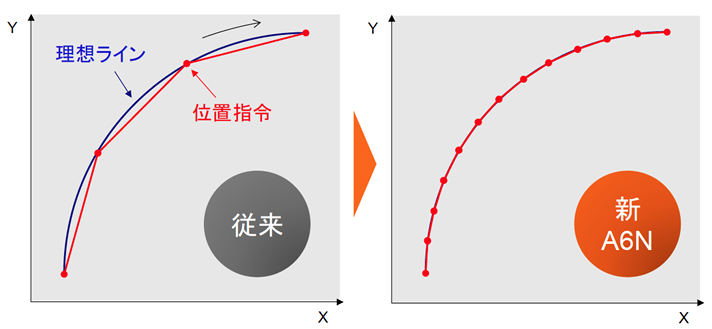
単位距離あたりの位置指令のポイント数が増加エンコーダ分解能向上と合わせて、指令が大幅に円滑化
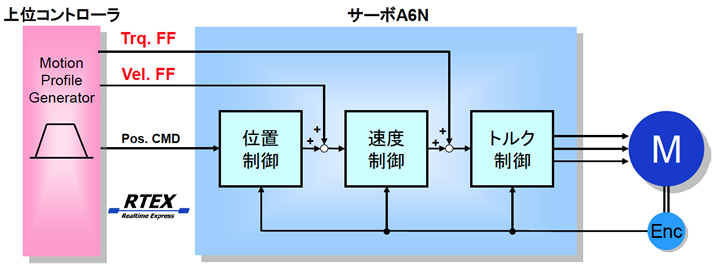
| ※ | 16バイトモード時は、速度FFとトルクFFのいずれか一つの選択になります。 |
|---|---|
| ※ | トルクFFは、円弧補間時のトルク補償にも利用できます。 |

ご注文・ご使用に際してのお願い(制御部品・電子デバイス)[特定商品を除く]
ご注文・ご使用に際してのお願い(制御部品・電子デバイス)[特定商品]
ご注文・ご使用に際してのお願い(FAセンサ・システム[モータ以外])
ご注文・ご使用に際してのお願い(産業用モータ専用)